3D Reconstruction Tool Kit - 3D RTK
• Блок автоматизированного снятия с изображения координат реперных точек - CADT
• Блок снятия с изображения координат произвольных точек - CDT
• Блок создания таблицы геометрической коррекции изображения - CTCT
• Блок построения цифровой модели рельефа - DEMT
• Блок восстановления внешней ориентации съемки - EORT
• Блок определения фокусного расстояния съемочной камеры - FDT
• Блок калибровки положения главной точки изображения - PPCT
• Блок построения стереоизображения рельефа - SICT
• Блок определения положения элемента наблюдаемой сцены - OPM
Комплект программ для создания модельных изображений на основе реальных прототипов Modeler Image Tools - MIT
Программы для технических измерений
Задача восстановления параметров внешней ориентации съемки - это задача обратная задаче восстановления координат точек снятой поверхности. Настоящий блок восстанавливает внешнюю ориентацию съемки по реперным точкам, расположенным на опорной плоскости снятой сцены. Параметры внешней ориентации определяются относительно этой плоскости.
Вход блока:
- внутренние параметры съемочной камеры;
- координаты не менее, чем четырех реперных точек в системе координат опорной плоскости сцены;
- координаты их изображений на снимке в системе координат снимка.
Бесплатная версия работает с четырьмя реперными точками. Платная - с любым количеством, что позволяет получать точные данные об ориентации съемки.
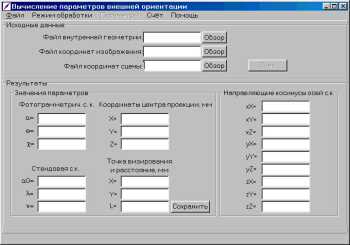
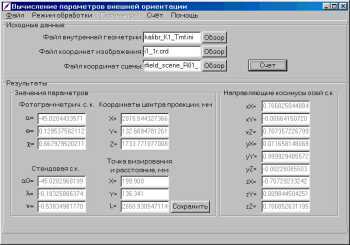
Выход блока - параметры внешней ориентации в трех разных системах ориентации - не путать с системами координат.
1. Фотограмметрическая система, в которой относительно неподвижной сцены указывается положение камеры с ее матрицей и центром проекции (фокусом камеры). Это указание осуществляется тремя углами и тремя координатами. Все используемые системы координат считаются ортогональными. Фотограмметрическая система удобна и общепринята в практике аэрофотосъемки.
2. Стендовая система, в которой относительно неподвижной камеры указывается положение подвижной сцены с точкой визирования. Это указание осуществляется тремя углами, двумя координатами точки визирования на опорной плоскости сцены и расстоянием между точкой визирования и центром проекции (фокусом камеры). Все используемые системы координат считаются ортогональными. Стендовая система удобна и общепринята в практике лабораторных исследований и моделирования.
3. Математическая система (название условновное), в которой указываются углы между осями координат сцены и камеры и расстояние между началами систем, помещенных в точку визирования и в центр проекции. Используемые системы координат могут быть любыми. Математическая система удобна для перехода к любой системе ориентации и для проведения расчетов в реальной и лабораторной практике.
Данные о координатах реперных точек на сцене поступают из файлов, сформированных в результате прямых замеров, данные о координатах реперных точек на изображениях поступают из файлов - результатов работы блоков определения координат реперных точек на изображениях - CADT и CDT.
В настоящее время блок восстанавливает ориентацию по реперным точкам, расположенным на плоскости. По заказу группа разработает методику и программу восстановления внешней ориентации съемки по реперным точкам, произвольно расположенным в пространстве и выведет выходные данные в любой удобной для заказчика системе ориентации.
Вход блока:
- внутренние параметры съемочной камеры;
- координаты не менее, чем четырех реперных точек в системе координат опорной плоскости сцены;
- координаты их изображений на снимке в системе координат снимка.
Бесплатная версия работает с четырьмя реперными точками. Платная - с любым количеством, что позволяет получать точные данные об ориентации съемки.
Выход блока - параметры внешней ориентации в трех разных системах ориентации - не путать с системами координат.
1. Фотограмметрическая система, в которой относительно неподвижной сцены указывается положение камеры с ее матрицей и центром проекции (фокусом камеры). Это указание осуществляется тремя углами и тремя координатами. Все используемые системы координат считаются ортогональными. Фотограмметрическая система удобна и общепринята в практике аэрофотосъемки.
2. Стендовая система, в которой относительно неподвижной камеры указывается положение подвижной сцены с точкой визирования. Это указание осуществляется тремя углами, двумя координатами точки визирования на опорной плоскости сцены и расстоянием между точкой визирования и центром проекции (фокусом камеры). Все используемые системы координат считаются ортогональными. Стендовая система удобна и общепринята в практике лабораторных исследований и моделирования.
3. Математическая система (название условновное), в которой указываются углы между осями координат сцены и камеры и расстояние между началами систем, помещенных в точку визирования и в центр проекции. Используемые системы координат могут быть любыми. Математическая система удобна для перехода к любой системе ориентации и для проведения расчетов в реальной и лабораторной практике.
Данные о координатах реперных точек на сцене поступают из файлов, сформированных в результате прямых замеров, данные о координатах реперных точек на изображениях поступают из файлов - результатов работы блоков определения координат реперных точек на изображениях - CADT и CDT.
В настоящее время блок восстанавливает ориентацию по реперным точкам, расположенным на плоскости. По заказу группа разработает методику и программу восстановления внешней ориентации съемки по реперным точкам, произвольно расположенным в пространстве и выведет выходные данные в любой удобной для заказчика системе ориентации.