3D Reconstruction Tool Kit - 3D RTK
• Блок автоматизированного снятия с изображения координат реперных точек - CADT
• Блок снятия с изображения координат произвольных точек - CDT
• Блок создания таблицы геометрической коррекции изображения - CTCT
• Блок построения цифровой модели рельефа - DEMT
• Блок восстановления внешней ориентации съемки - EORT
• Блок определения фокусного расстояния съемочной камеры - FDT
• Блок калибровки положения главной точки изображения - PPCT
• Блок построения стереоизображения рельефа - SICT
• Блок определения положения элемента наблюдаемой сцены - OPM
Комплект программ для создания модельных изображений на основе реальных прототипов Modeler Image Tools - MIT
Программы для технических измерений
Построение цифровой модели рельефа местности по ее изображениям является центральной задачей всей той области науки и практики, которая называется трехмерной реконструкцией. Именно ради нее решаются все другие задачи - определяются внутренние параметры съемочных камер, параметры внешней ориентации съемки, находятся координаты реперных и соответственных точек. Настоящий блок предназначен для построения и визуализации цифровой модели трехмерной поверхности по ее оптическим изображениям.
Для решения этой задачи надо, помимо самих снимков, обладать данными об их положении в пространстве. Это положение может задаваться двумя способами:
1. Указанием координат некоторых точек на местности и их изображений на снимках. Такие точки называются реперными.
2. Указанием параметров внешней ориентации съемки - углов и расстояний и внутренних параметров камеры.
Принципиально эти способы ничем не отличаются друг от друга. В реальности они влияют на методы и точность решения указанной задачи.
Таким образом, задача восстановления трехмерной поверхности по ее изображениям, решается по двум входам:
1. Изображения плюс координаты реперных точек.
2. Изображения плюс геометрические параметры съемки и камеры. Интерфейсы входов сделаны, по возможности, унифицированными. Естественно, что поверхность строится по массиву принадлежащих ей точек.
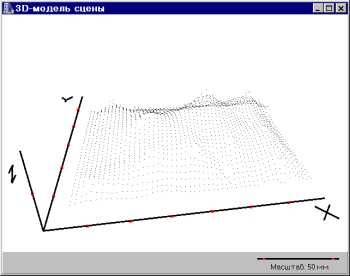
Итог решения задачи может сохраняться в виде файла трехмерных координат и визуализироваться, во-первых, в виде отдельных точек в пространстве трех измерений.
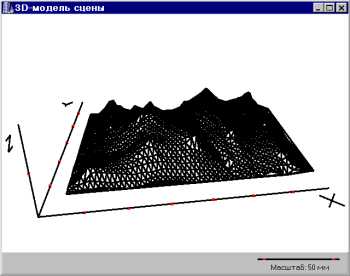
Во-вторых,в виде трехмерного каркаса - триангулированной поверхности.
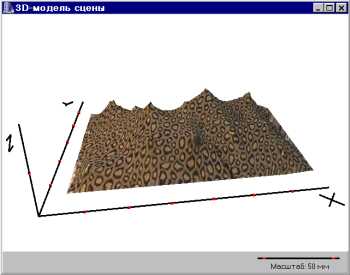
В третьих, в виде текстурированной поверхности с соответствующей ей раскраской.
Понятно, что визуализация осуществляется в проекции на экран монитора.
Программа позволяет повернуть цифровую модель в любое положение и сфотографировать ее виртуальным фотоаппаратом, у которого задаются любые параметры внутренней геометрии. Это открывает большие возможности для моделирования разнообразных съемочных ситуаций.
Расположение точек может быть регулярным и произвольным. Методы их нахождения разными. Это влияет на точность, скорость, равномерность и полноту восстановления поверхности. Для быстрой оценки лучше использовать метод с произвольным щагом. Для точного, полного и равномерного восстановления более подходит метод с регулярным шагом.
Способ получения снимков и диапазон волн, в которых эти снимки были получены, не носит принципиального характера для работоспособности программы. Однако, как всегда, конкретные условия влияют на конкретные методы реализации принципов. По заказу группа разработает методику и программу для восстановления трехмерной картины съемки по данным, полученным в разных диапазонах электромагнитных и механических волн.
Для решения этой задачи надо, помимо самих снимков, обладать данными об их положении в пространстве. Это положение может задаваться двумя способами:
1. Указанием координат некоторых точек на местности и их изображений на снимках. Такие точки называются реперными.
2. Указанием параметров внешней ориентации съемки - углов и расстояний и внутренних параметров камеры.
Принципиально эти способы ничем не отличаются друг от друга. В реальности они влияют на методы и точность решения указанной задачи.
Таким образом, задача восстановления трехмерной поверхности по ее изображениям, решается по двум входам:
1. Изображения плюс координаты реперных точек.
2. Изображения плюс геометрические параметры съемки и камеры. Интерфейсы входов сделаны, по возможности, унифицированными. Естественно, что поверхность строится по массиву принадлежащих ей точек.
Итог решения задачи может сохраняться в виде файла трехмерных координат и визуализироваться, во-первых, в виде отдельных точек в пространстве трех измерений.
Во-вторых,в виде трехмерного каркаса - триангулированной поверхности.
В третьих, в виде текстурированной поверхности с соответствующей ей раскраской.
Понятно, что визуализация осуществляется в проекции на экран монитора.
Программа позволяет повернуть цифровую модель в любое положение и сфотографировать ее виртуальным фотоаппаратом, у которого задаются любые параметры внутренней геометрии. Это открывает большие возможности для моделирования разнообразных съемочных ситуаций.
Расположение точек может быть регулярным и произвольным. Методы их нахождения разными. Это влияет на точность, скорость, равномерность и полноту восстановления поверхности. Для быстрой оценки лучше использовать метод с произвольным щагом. Для точного, полного и равномерного восстановления более подходит метод с регулярным шагом.
Способ получения снимков и диапазон волн, в которых эти снимки были получены, не носит принципиального характера для работоспособности программы. Однако, как всегда, конкретные условия влияют на конкретные методы реализации принципов. По заказу группа разработает методику и программу для восстановления трехмерной картины съемки по данным, полученным в разных диапазонах электромагнитных и механических волн.